

-
- 公司:
- 北京华夏艺匠模型科技有限公司
-
- 联系:
- 李经理
-
- 手机:
-
18810008182
-
- 地址:
- 北京房山区工业园甲88号


- 在制作模型当中打磨修正的工具有什么呢?852阅读 2023-02-07 11:36:19
- 如何挑选一款军事模型?758阅读 2023-02-07 11:35:25
- 建筑模型制作流程有哪些?756阅读 2023-02-07 11:34:08
- 建筑模型的主要分类介绍719阅读 2023-02-07 11:33:13
- 军事模型具备哪些独特优势?684阅读 2023-02-07 11:31:57

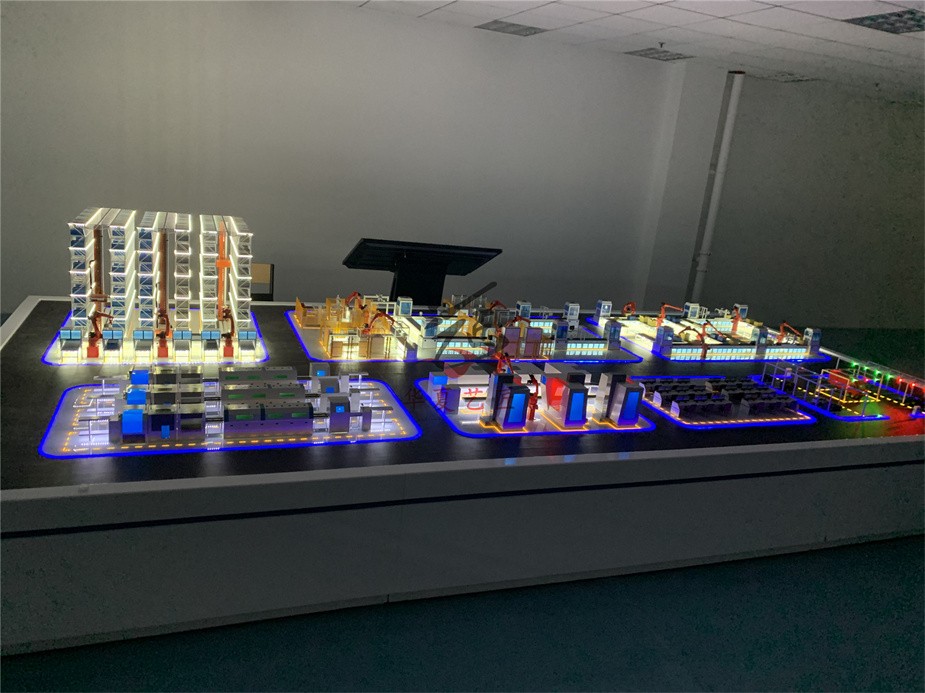
丰台自动化生产线模型,采煤机动态模型
2024-04-25 02:00:02 191次浏览
价 格:面议
岸桥采用双小车、场桥采用轨道式场桥模型设计。场桥、岸桥整体结构全部采用304金属铁板,激光切割氩弧焊焊接成型,采用进口的汽车金属漆烤漆工艺效果。板材成型采用压力机和弯管机进行矫正和弯曲成型,不采用锤击方式。连接孔采用机械打孔,不采用手工铰孔和扩孔。
AGV自动导引车采用整体结构全部采用304金属铁板,激光切割氩弧焊焊接成型,采用进口的汽车金属漆烤漆工艺效果。板材成型采用压力机和弯管机进行矫正和弯曲成型,不采用锤击方式。连接孔采用机械打孔,不采用手工铰孔和扩孔。
西门子PLC不同控制芯片组合使用,同时具有网关功能。实现动态暂停、运行传送信号仿真动态模拟。可以实现对船上的集装箱抓取、中转平台存箱、吊具抓取集装箱准确放到AGV,AGV行驶到堆场后卸下集装箱。制作方负责把所有设备数据调通学生可以通过软件编程来控制场桥、岸桥、AGV从而达到教学实训、培训、编程教学学习的作用。
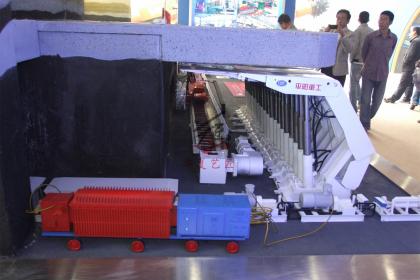
煤矿大比例动态仿真模型演示功能:
(1)喷浆机器人:①激光雷达伸出→②激光雷达收回→③机械臂按照预设的巷道轮廓模拟运动→④机械臂归位→重复①-④
(2)抓管机器人:①抓取臂回转90°→②抓取臂模拟管路抓取→③抓取臂模拟管路举升→④站人臂回转90°→⑤站人臂回位→⑥抓取臂回位→重复①-⑥
(3)巷道修复机器人:①机械臂伸展到预定位置→②铣挖头旋转→③机械臂按照预定轨迹上下运动→④机械臂回转10°→重复①-④
(3)设备布置传感器用于采集各个关节运动量暂停与运行信号传输,确定设备空间位姿信息;动态部分采用液压升降、步进电机与电机驱动器带动齿轮和信号传输进行动力传动与信号控制。
(4)电控系统控制调试阶段,在此设备基础上进行运动控制相关开发编程,设备运行进行角度、上升、下降、旋转等功能,对设备工作原理流程进行调试。通过传感器的反馈信号传输给控制终端对设备进行启动、暂停控制,控制用操控台进行整体控制设计。
-
 多系统联动式数字沙盘采用“多位一体”多媒体数字沙盘集成技术,综合运用同步播放系统、360°全息影像、“全景虚拟现实VR互动”系统、自动升降辅幕(纱幕)系统、“电脑追光捕捉”互动系统、中控互动讲解系统等高科技展示技术,结合展示主题的空间策展设21-10-27 00:06:01
多系统联动式数字沙盘采用“多位一体”多媒体数字沙盘集成技术,综合运用同步播放系统、360°全息影像、“全景虚拟现实VR互动”系统、自动升降辅幕(纱幕)系统、“电脑追光捕捉”互动系统、中控互动讲解系统等高科技展示技术,结合展示主题的空间策展设21-10-27 00:06:01 -
 油泥是一种人造材料。凝固后极软,较软,坚硬。油泥可塑性强,黏性、韧性比黄泥(黏土模型) 强。它在塑造时使用方便,成型过程中可随意雕塑、修整,成型后不易干裂,可反复使用。油泥价格较高,易于携带,制作一些小巧、异型和曲面较多的造型更为合适。一般23-07-24 18:30:01
油泥是一种人造材料。凝固后极软,较软,坚硬。油泥可塑性强,黏性、韧性比黄泥(黏土模型) 强。它在塑造时使用方便,成型过程中可随意雕塑、修整,成型后不易干裂,可反复使用。油泥价格较高,易于携带,制作一些小巧、异型和曲面较多的造型更为合适。一般23-07-24 18:30:01 -
 公司创立以来,专注于提供建筑模型、工业模型、机械模型、楼盘模型、规划模型、房地产模型、多媒体模型、智能家居模型、交通模型、售楼部模型、物流模型、智能模型、物联网模型、别墅模型等领域的模型设计制作、模型材料研究及高仿真精品模型技术开发。经过多21-10-29 20:12:01
公司创立以来,专注于提供建筑模型、工业模型、机械模型、楼盘模型、规划模型、房地产模型、多媒体模型、智能家居模型、交通模型、售楼部模型、物流模型、智能模型、物联网模型、别墅模型等领域的模型设计制作、模型材料研究及高仿真精品模型技术开发。经过多21-10-29 20:12:01 -
 1、直观性 建筑模型是以缩微实体的方式来表现建筑设计的。这种形式使建筑设计的构思表现得更加深入、完善,以直接近于真实的建筑。由于它展示的是直观实体在三维空间的形象,因而便于人们研究某个建筑项目与环境的关系,以做出可行性方案。建筑模型的直观性23-10-30 22:42:02
1、直观性 建筑模型是以缩微实体的方式来表现建筑设计的。这种形式使建筑设计的构思表现得更加深入、完善,以直接近于真实的建筑。由于它展示的是直观实体在三维空间的形象,因而便于人们研究某个建筑项目与环境的关系,以做出可行性方案。建筑模型的直观性23-10-30 22:42:02 -
 公司创立以来,专注于提供建筑模型、工业模型、机械模型、楼盘模型、规划模型、房地产模型、多媒体模型、智能家居模型、交通模型、售楼部模型、物流模型、智能模型、物联网模型、别墅模型等领域的模型设计制作、模型材料研究及高仿真精品模型技术开发。经过多21-10-29 20:24:01
公司创立以来,专注于提供建筑模型、工业模型、机械模型、楼盘模型、规划模型、房地产模型、多媒体模型、智能家居模型、交通模型、售楼部模型、物流模型、智能模型、物联网模型、别墅模型等领域的模型设计制作、模型材料研究及高仿真精品模型技术开发。经过多21-10-29 20:24:01 -
 在初步设计即方案设计阶段的称工作模型,制作可简略些,以便加工和拆卸。材料可用油泥、硬纸板和塑料等。在完成初步设计后,可以制作较精致的模型──展示模型(见图),供审定设计方案之用。展示模型不仅要求表现建筑物接近真实的比例、造型、色彩、质感和规24-04-26 21:00:01
在初步设计即方案设计阶段的称工作模型,制作可简略些,以便加工和拆卸。材料可用油泥、硬纸板和塑料等。在完成初步设计后,可以制作较精致的模型──展示模型(见图),供审定设计方案之用。展示模型不仅要求表现建筑物接近真实的比例、造型、色彩、质感和规24-04-26 21:00:01 -
 北京煤矿动态模型定制 面议结构设计检验由于工业模型是可装配的,因此它能直观地反映出结构是否合理,安装是否容易。有利于问题的早期发现和解决。 避免直接开模风险由于模具制造成本普遍较高,规模较大的模具价值数十万至数百万元,如在开模过程中发现结构不合理或其他问题,其21-04-26 11:27:01
北京煤矿动态模型定制 面议结构设计检验由于工业模型是可装配的,因此它能直观地反映出结构是否合理,安装是否容易。有利于问题的早期发现和解决。 避免直接开模风险由于模具制造成本普遍较高,规模较大的模具价值数十万至数百万元,如在开模过程中发现结构不合理或其他问题,其21-04-26 11:27:01 -
 所谓机理模型,本质上是理想模型(或抽象模型)。当模型能够准确描述真实对象时(或误差足够小时),模型的计算结果能够与实际结果高度一致,使用起来非常方便。如果模型主要从事纯算数或逻辑计算、几何对象转换等。,计算结果确实可以与现实高度融合。因21-04-26 12:24:01
所谓机理模型,本质上是理想模型(或抽象模型)。当模型能够准确描述真实对象时(或误差足够小时),模型的计算结果能够与实际结果高度一致,使用起来非常方便。如果模型主要从事纯算数或逻辑计算、几何对象转换等。,计算结果确实可以与现实高度融合。因21-04-26 12:24:01 -
 塑料是一种常用制作模型的新材料。塑料品种很多,主要品种有五十多种,制作模型应用多的是热塑性塑料,主要有聚氯乙烯(PVC)、聚苯乙烯、ABS工程塑料、有机玻璃板材、泡沫塑料板材等。聚氯乙烯耐热性低,可用压塑成型、吹塑成型、压铸成型等多种成型方23-07-24 17:12:01
塑料是一种常用制作模型的新材料。塑料品种很多,主要品种有五十多种,制作模型应用多的是热塑性塑料,主要有聚氯乙烯(PVC)、聚苯乙烯、ABS工程塑料、有机玻璃板材、泡沫塑料板材等。聚氯乙烯耐热性低,可用压塑成型、吹塑成型、压铸成型等多种成型方23-07-24 17:12:01 -
 建筑及环境艺术模型介于平面图纸与实际立体空间之间,它把两者有机的联系在一起,是一种三维的立体模式,建筑模型有助于设计创作的推敲,可以直观地体现设计意图,弥补图纸在表现上的局限性(见建筑制图)。它既是设计师设计过程的一部分,同时也属于设计的一21-09-01 20:00:02
建筑及环境艺术模型介于平面图纸与实际立体空间之间,它把两者有机的联系在一起,是一种三维的立体模式,建筑模型有助于设计创作的推敲,可以直观地体现设计意图,弥补图纸在表现上的局限性(见建筑制图)。它既是设计师设计过程的一部分,同时也属于设计的一21-09-01 20:00:02 -
 公司厂区6500平方米,公司员工达到200人技术比较的工业机械沙盘模型公司。秉承以人为本的公司理念坚持制作有灵魂的模型作品,为国内诸多能源企业、机械制造企业、地质矿产、石油钻探、博物馆、房地产业、展览设计业、军事等诸多领域的客户提供的设计、24-04-26 15:15:01
公司厂区6500平方米,公司员工达到200人技术比较的工业机械沙盘模型公司。秉承以人为本的公司理念坚持制作有灵魂的模型作品,为国内诸多能源企业、机械制造企业、地质矿产、石油钻探、博物馆、房地产业、展览设计业、军事等诸多领域的客户提供的设计、24-04-26 15:15:01 -
 建筑沙盘的制作,其划分及精雕之处均由计算机排版设计、数控设备加工、数控铣床机进行表面雕刻,并采用手工无缝拼接技术粘接,以确保尺寸、线条流畅,真实反映设计构想。同时追求建筑表面真实质感及色彩风格化,使其具有引人注目的视觉化风格,我方将根据其立24-04-26 08:51:01
建筑沙盘的制作,其划分及精雕之处均由计算机排版设计、数控设备加工、数控铣床机进行表面雕刻,并采用手工无缝拼接技术粘接,以确保尺寸、线条流畅,真实反映设计构想。同时追求建筑表面真实质感及色彩风格化,使其具有引人注目的视觉化风格,我方将根据其立24-04-26 08:51:01 -
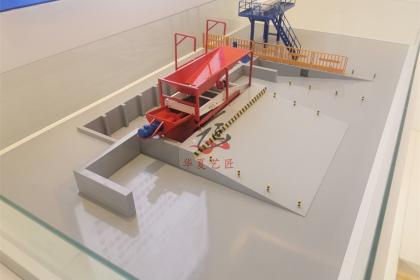
 各模型图纸由买方提供,模型制作要求如下: (1)卸船机 1)制作比例1:50; 2)模型大小:2.15m*0.65m*1.39m(长*宽*高); 3)各运动机构:起升机构、开闭机构、小车运行机构、走行机构、俯仰机构; 4)带展览底24-04-26 08:54:01
各模型图纸由买方提供,模型制作要求如下: (1)卸船机 1)制作比例1:50; 2)模型大小:2.15m*0.65m*1.39m(长*宽*高); 3)各运动机构:起升机构、开闭机构、小车运行机构、走行机构、俯仰机构; 4)带展览底24-04-26 08:54:01 -
 建筑沙盘的制作,其划分及精雕之处均由计算机排版设计、数控设备加工、数控铣床机进行表面雕刻,并采用手工无缝拼接技术粘接,以确保尺寸、线条流畅,真实反映设计构想。同时追求建筑表面真实质感及色彩风格化,使其具有引人注目的视觉化风格,我方将根据其立24-04-26 08:57:01
建筑沙盘的制作,其划分及精雕之处均由计算机排版设计、数控设备加工、数控铣床机进行表面雕刻,并采用手工无缝拼接技术粘接,以确保尺寸、线条流畅,真实反映设计构想。同时追求建筑表面真实质感及色彩风格化,使其具有引人注目的视觉化风格,我方将根据其立24-04-26 08:57:01 -
 建筑沙盘模型的种类有哪些?一、粘土模型粘土材料来源广泛,取材方便,价格低廉。经过洗泥工艺和炼熟工艺,质地更加细腻。粘土具有一定的粘结性和可塑性,可以在塑造过程中反复修改,方便随意调整、修复、刮擦、填充和填充。也可以重复使用,这是一种理想的造23-10-30 15:42:01
建筑沙盘模型的种类有哪些?一、粘土模型粘土材料来源广泛,取材方便,价格低廉。经过洗泥工艺和炼熟工艺,质地更加细腻。粘土具有一定的粘结性和可塑性,可以在塑造过程中反复修改,方便随意调整、修复、刮擦、填充和填充。也可以重复使用,这是一种理想的造23-10-30 15:42:01 -
 网络安全模型通信双方在网络上传输信息,需要先在发收之间建立一条逻辑通道。这就要先确定从发送端到接收端的路由,再选择该路由上使用的通信协议,如TCP/IP。为了在开放式的网络环境中安全地传输信息,需要对信息提供安全机制和安全服务。信息的安全传23-04-17 20:03:01
网络安全模型通信双方在网络上传输信息,需要先在发收之间建立一条逻辑通道。这就要先确定从发送端到接收端的路由,再选择该路由上使用的通信协议,如TCP/IP。为了在开放式的网络环境中安全地传输信息,需要对信息提供安全机制和安全服务。信息的安全传23-04-17 20:03:01 -
 北京工业动态模型公司制作 面议由于传统手工模型制作的方法简便、快速同时取材广泛和经济等优势,在现代设计过程中仍然发挥着现代技术不可替代的作用与优势。模型制作是根据原有的物体模型加工制作的过程。模型制作的过程不仅渗透着设计师对产品的理解,而且也是设计师设计思想、设计创造21-06-14 15:53:52
北京工业动态模型公司制作 面议由于传统手工模型制作的方法简便、快速同时取材广泛和经济等优势,在现代设计过程中仍然发挥着现代技术不可替代的作用与优势。模型制作是根据原有的物体模型加工制作的过程。模型制作的过程不仅渗透着设计师对产品的理解,而且也是设计师设计思想、设计创造21-06-14 15:53:52 -
 建筑模型是将建筑理念付诸实践的桥梁。建筑模型制作体现了人们对于空间与建筑、平面与立体之间的感受,是设计草图的基本前提。建筑模型设计必将激发入门者以及有经验的模型制作者一种全新的、宝贵的模型制作思路。建筑模型是建筑模型设计及都市规划方案中。因21-09-01 23:21:01
建筑模型是将建筑理念付诸实践的桥梁。建筑模型制作体现了人们对于空间与建筑、平面与立体之间的感受,是设计草图的基本前提。建筑模型设计必将激发入门者以及有经验的模型制作者一种全新的、宝贵的模型制作思路。建筑模型是建筑模型设计及都市规划方案中。因21-09-01 23:21:01 -
 北京机械动态模型制作 面议就是把真实机器按照一定比例做出来,以及外观动态效果的一种模仿。 北京机械模型是模型的一种,知识领域不同而已。模型大多是用来观看和科研及军事用途。模型又分很多种:有数字模型和实物模型、投影加实物组合模型 ,等等。 数字模型就是利用电脑20-03-13 11:06:01
北京机械动态模型制作 面议就是把真实机器按照一定比例做出来,以及外观动态效果的一种模仿。 北京机械模型是模型的一种,知识领域不同而已。模型大多是用来观看和科研及军事用途。模型又分很多种:有数字模型和实物模型、投影加实物组合模型 ,等等。 数字模型就是利用电脑20-03-13 11:06:01 -
 它既是设计师设计过程的一部分,同时也属于设计的一种表现形式,被广泛应用于城市建设、房地产开发、商品房销售、设计投标与招商合作等方面。建筑模型为建筑学术语,以其特有的形象性表现出设计方案之空间效果。因此,在国内外建筑、规划或展览等许多部门模型21-09-01 23:03:02
它既是设计师设计过程的一部分,同时也属于设计的一种表现形式,被广泛应用于城市建设、房地产开发、商品房销售、设计投标与招商合作等方面。建筑模型为建筑学术语,以其特有的形象性表现出设计方案之空间效果。因此,在国内外建筑、规划或展览等许多部门模型21-09-01 23:03:02
被浏览过 2073599 次 版权所有:北京华夏艺匠模型科技有限公司(ID:10017876) 技术支持:颜艳珍
第13年
